Universal Robot MCP使用指南 逐步教程详解
介绍
Model Context Protocol(MCP)代表了AI系统集成的重大突破,使AI助手能够通过标准化接口与外部工具和服务进行交互。当应用于工业机器人技术时,MCP改变了我们控制Universal Robot的方式,允许使用自然语言命令安全高效地控制复杂的机器人系统。
本教程将指导您设置和使用Universal Robot MCP服务器,使Claude、ChatGPT和其他MCP兼容客户端等AI助手能够通过简单的对话命令控制UR机器人。您将学习安装、配置、基本操作和高级安全功能。
系统要求:
- 搭载Python 3.8+的计算机(Windows、macOS或Linux)
- MCP兼容客户端(LM Studio、VS Code + Cline、Cursor或Zed)
- Universal Robot(UR3/UR5/UR10/UR16/UR20/UR30)或仿真环境
- 计算机与机器人之间的网络连接
- 对机器人安全程序的基本了解
注意: Universal Robot MCP服务器目前正在积极开发和测试中。在生产系统中使用时请谨慎操作。
Github Repository
PyPI Package
Model Context Protocol
Model Context Protocol(MCP)是Anthropic开发的开放标准,用于将AI助手连接到外部数据源和工具。MCP不需要为每个系统创建自定义集成,而是提供了一个通用协议,使AI模型能够安全访问内容存储库、商业工具和开发环境。
将MCP视为一个标准化的桥梁,允许AI助手摆脱信息孤岛并访问真实世界的数据。对于机器人应用,这意味着AI可以直接控制Universal Robot等物理系统,同时在不同工具和数据集之间维持上下文。
Introducing the Model Context Protocol
Universal Robot MCP
Universal Robot MCP服务器是一个专门的实现,用于连接AI助手和Universal Robot工业机械臂。该服务器提供安全的实时控制功能,同时维持工业自动化所需的安全标准。
主要特性:
- 机器人连接管理:建立和维持与UR机器人的稳定连接
- 实时状态监控:跟踪关节位置、姿态和系统健康状况
- 运动控制:精确执行关节和直线运动
- 安全集成:内置碰撞检测和运动验证
- 仿真模式:在无物理硬件情况下测试机器人程序
可用的MCP工具:
connect_robot- 建立与Universal Robot的连接disconnect_robot- 安全断开与机器人的连接get_robot_status- 获取当前机器人状态和位置move_robot_joints- 控制单个关节角度move_robot_linear- 执行笛卡尔坐标运动
服务器支持所有Universal Robot型号(UR3、UR5、UR10、UR16、UR20、UR30),并与UR软件版本3.0及以上保持兼容。
步骤1:安装MCP客户端
您需要一个MCP兼容客户端来与Universal Robot MCP服务器通信。有以下几种选择(排名不分先后):
LM Studio
具有原生MCP支持(v0.3.17+)的免费本地AI应用程序。
- 从lmstudio.ai下载
- 安装并启动应用程序
- MCP支持是内置的
VS Code
微软支持MCP的开发环境。
- 安装Visual Studio Code
- 通过设置配置MCP服务器
- 与GitHub Copilot或其他AI扩展程序一起使用
Cline
具有MCP集成的AI编程助手扩展。
- 从cline.bot下载
- 作为VS Code扩展安装或使用独立版本
- 通过扩展设置配置MCP服务器
Cursor
支持MCP的AI代码编辑器。
- 从cursor.com下载
- 创建账户(有免费套餐)
- 在设置 > 功能 > MCP中配置MCP
OpenCode
具有MCP集成的基于终端的AI编程助手。
- 从opencode.ai下载
- 支持多种AI模型(OpenAI、Claude、Gemini)
- 通过配置文件设置MCP服务器
Zed
具有基本MCP支持的开源编辑器。
- 从zed.dev下载
- 目前支持提示模板
- 完整工具支持正在开发中
Claude Desktop
Anthropic官方桂面应用,具有原生MCP支持。
- 从claude.ai/desktop下载
- MCP功能需要Claude Pro订阅
- 通过应用设置配置MCP服务器
选择适合您工作流的客户端,然后进入下一步。
步骤2:(可选)安装uv
根据您选择的配置方法,您可能需要安装其他工具:
如果您想使用uvx(隔离执行):
1 | # On macOS and Linux |
1 | # With Homebrew (macOS only) |
1 | # With pip |
如果您想使用pip方法:
确保您已安装Python 3.8+和pip。无需其他安装。
更新uv(如果通过独立安装程序安装):
1 | uv self update |
uvx包含在uv中,提供隔离Python包执行。
Get Homebrew | uv official repository
步骤3:配置Universal Robot MCP
现在在您选择的MCP客户端中配置Universal Robot MCP服务器:
- Open LM Studio and go to the Program tab
- Click Install > Edit mcp.json to open the configuration file
- Add the Universal Robot MCP server configuration:
1 | { |
- Create a
.vscode/mcp.jsonfile in your workspace, or - Run “MCP: Open User Configuration” for global setup
- Add the server configuration:
1 | { |
- Click the MCP Servers icon in Cline
- Click “Configure MCP Servers”
- Add the server configuration:
1 | { |
- Go to Settings > Features > MCP
- Click “Add Custom MCP” or edit the mcp.json file
- Add the configuration:
1 | { |
- Edit your OpenCode config file
- Add under the
mcpsection:
1 | { |
- Open Claude Desktop settings
- Navigate to MCP configuration
- Add the server:
1 | { |
配置选项:
您可以在两种方法中选择:
- uvx方法(使用上述配置)
- pip方法 - 将命令替换为:
1 | "command": "python", |
注意:pip方法需要使用pip install universal-robot-mcp预先安装。
可选配置:
要指定自定义机器人IP地址,请在配置中添加env部分:
1 | { |
将192.168.1.100替换为您朼器人的实际IP地址。如果未指定,服务器将使用默认IP 192.168.1.100。
下一步:
- 保存配置文件
- 重启您的MCP客户端
- Universal Robot MCP服务器将作为工具可用
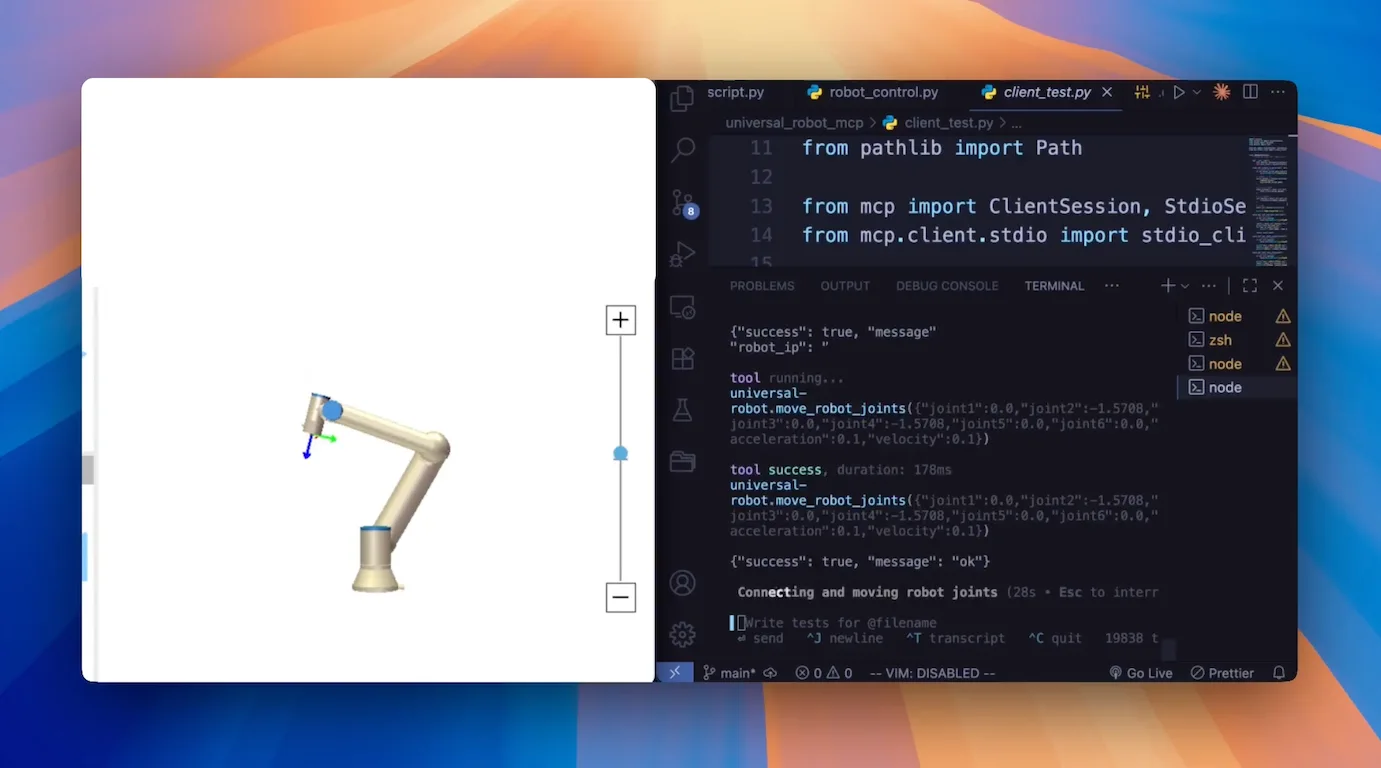
步骤4:基本使用
配置完成后,您可以开始通过自然语言命令控制Universal Robot:
连接您的朼器人:
1 | "连接到IP地址192.168.1.100的朼器人" |
基本命令:
1 | "朼器人的当前状态是什么?" |
连接到不同系统:
- 真实机器人:使用机器人的实际IP地址
- URSim仿真器:使用
127.0.0.1或localhost - Polyscope:在安装 > 常规中检查机器人的IP
示例:
1 | 您:"连接到Universal Robot" |
与其他MCP服务器的集成:
Universal Robot MCP服务器可以与同一客户端中的其他MCP服务器一起使用。例如,您可以将其与文件系统工具、网络爬虫或数据库连接器相结合,创建强大的自动化工作流:
1 | "用相机MCP服务器拍照,然后移动机器人检查零件" |
总结
您已成功学会了如何设置和使用Universal Robot MCP服务器,通过AI助手控制UR机器人。这种集成能够在保持安全标准和精度的同时,实现对工业机器人的自然语言控制。
主要优势:
- 通过AI助手进行自然语言机器人控制
- 跨不同开发环境的多客户端支持
- 为工业应用内置的安全功能
- 与其他MCP服务器的无缝集成
下一步:
- 通过对话式AI探索高级机器人编程
- 通过额外的MCP服务器与视觉系统和传感器结合
- 使用自然语言命令开发自定义自动化工作流
资源:
Universal Robot MCP服务器代表了人机交互的未来,复杂的工业自动化通过简单的对话变得可及。今天就开始用您的UR机器人进行实验,发现AI驱动自动化的新可能性。