Universal Robot MCP完全使用ガイド AIアシスタントで産業ロボット制御
はじめに
Model Context Protocol(MCP)は、AIシステム統合における画期的な技術で、AIアシスタントが標準化されたインターフェースを通じて外部ツールやサービスと連携することを可能にします。産業用ロボティクスに適用すると、MCPはUniversal Robotsの制御方法を変革し、自然言語コマンドで高度なロボットシステムを安全かつ効率的に制御できるようになります。
このチュートリアルでは、Universal Robot MCPサーバーのセットアップと使用方法を説明し、Claude、ChatGPT、その他のMCP対応クライアントがシンプルな会話コマンドでURロボットを制御できるようにします。インストール、設定、基本操作、高度な安全機能について学びます。
必要条件:
- Python 3.8+搭載のコンピュータ(Windows、macOS、またはLinux)
- MCP対応クライアント(LM Studio、VS Code + Cline、Cursor、またはZed)
- Universal Robot(UR3/UR5/UR10/UR16/UR20/UR30)またはシミュレーション環境
- コンピュータとロボット間のネットワーク接続
- ロボット安全手順の基本的な理解
注意: Universal Robot MCPサーバーは現在活発に開発・テスト中です。本番システムでの使用時は十分注意してください。
Github Repository
PyPI Package
Model Context Protocol
Model Context Protocol(MCP)は、AIアシスタントを外部データソースやツールに接続するためにAnthropic社が開発したオープン標準です。各システムに対してカスタム統合を作成する代わりに、MCPはAIモデルがコンテンツリポジトリ、ビジネスツール、開発環境に安全にアクセスできる汎用プロトコルを提供します。
MCPは、AIアシスタントが情報サイロから解放され、実世界のデータにアクセスできるようにする標準化されたブリッジと考えてください。ロボティクス応用では、これによりAIが異なるツールやデータセット間でコンテキストを維持しながら、Universal Robotsのような物理システムを直接制御できることを意味します。
Introducing the Model Context Protocol
Universal Robot MCP
Universal Robot MCPサーバーは、AIアシスタントとUniversal Robots産業用アームを橋渡しする特化した実装です。このサーバーは、産業オートメーションに必要な安全基準を維持しながら、安全でリアルタイムな制御機能を提供します。
主要機能:
- ロボット接続管理: URロボットへの安定した接続の確立と維持
- リアルタイム状態監視: 関節位置、姿勢、システム健全性の追跡
- モーション制御: 関節ベースと直線運動の両方を高精度で実行
- 安全統合: 組み込み衝突検出と動作検証
- シミュレーションモード: 物理ハードウェアなしでロボットプログラムをテスト
利用可能なMCPツール:
connect_robot- Universal Robotへの接続を確立disconnect_robot- ロボットから安全に切断get_robot_status- 現在のロボット状態と位置を取得move_robot_joints- 個別の関節角度を制御move_robot_linear- デカルト座標での動作を実行
サーバーはすべてのUniversal Robotモデル(UR3、UR5、UR10、UR16、UR20、UR30)をサポートし、URソフトウェアバージョン3.0以上との互換性を維持しています。
ステップ1: MCPクライアントのインストール
Universal Robot MCPサーバーと通信するには、MCP対応クライアントが必要です。以下のような選択肢があります(順不同):
LM Studio
ネイティブMCPサポート(v0.3.17+)を持つ無料のローカルAIアプリケーション。
- lmstudio.aiからダウンロード
- アプリケーションをインストールして起動
- MCPサポートは組み込み済み
VS Code
MCPサポートを持つMicrosoftの開発環境。
- Visual Studio Codeをインストール
- 設定からMCPサーバーを設定
- GitHub Copilotやその他のAI拡張機能と併用
Cline
MCP統合を持つAIコーディングアシスタント拡張機能。
- cline.botからダウンロード
- VS Code拡張機能としてインストールまたはスタンドアロンで使用
- 拡張機能設定からMCPサーバーを設定
Cursor
MCPサポートを持つAIコードエディタ。
- cursor.comからダウンロード
- アカウント作成(無料ティア利用可能)
- 設定 > 機能 > MCPでMCPを設定
OpenCode
MCP統合を持つターミナルベースのAIコーディングアシスタント。
- opencode.aiからダウンロード
- 複数のAIモデル(OpenAI、Claude、Gemini)をサポート
- 設定ファイルからMCPサーバーを設定
Zed
基本的なMCPサポートを持つオープンソースエディタ。
- zed.devからダウンロード
- 現在はプロンプトテンプレートをサポート
- フルツールサポートは開発中
Claude Desktop
ネイティブMCPサポートを持つAnthropic公式デスクトップアプリ。
- claude.ai/desktopからダウンロード
- MCP機能にはClaude Proサブスクリプションが必要
- アプリ設定からMCPサーバーを設定
ワークフローに適したクライアントを選択して次のステップに進んでください。
ステップ2: (オプション)uvのインストール
選択した設定方法によっては、追加ツールのインストールが必要な場合があります:
uvx(分離実行)を使用したい場合:
1 | # On macOS and Linux |
1 | # With Homebrew (macOS only) |
1 | # With pip |
pipメソッドを使用したい場合:
Python 3.8+とpipがインストールされていることを確認してください。追加のインストールは不要です。
uvのアップデート(スタンドアロンインストーラー経由でインストールした場合):
1 | uv self update |
uvxはuvに含まれており、分離されたPythonパッケージ実行を提供します。
Get Homebrew | uv official repository
ステップ3: Universal Robot MCPの設定
選択したMCPクライアントでUniversal Robot MCPサーバーを設定します:
- Open LM Studio and go to the Program tab
- Click Install > Edit mcp.json to open the configuration file
- Add the Universal Robot MCP server configuration:
1 | { |
- Create a
.vscode/mcp.jsonfile in your workspace, or - Run “MCP: Open User Configuration” for global setup
- Add the server configuration:
1 | { |
- Click the MCP Servers icon in Cline
- Click “Configure MCP Servers”
- Add the server configuration:
1 | { |
- Go to Settings > Features > MCP
- Click “Add Custom MCP” or edit the mcp.json file
- Add the configuration:
1 | { |
- Edit your OpenCode config file
- Add under the
mcpsection:
1 | { |
- Open Claude Desktop settings
- Navigate to MCP configuration
- Add the server:
1 | { |
設定オプション:
2つの方法から選択できます:
- uvxメソッド (上記の設定を使用)
- pipメソッド - コマンドを以下に置き換え:
1 | "command": "python", |
注意: pipメソッドはpip install universal-robot-mcpでの事前インストールが必要です。
オプション設定:
カスタムロボットIPアドレスを指定するには、設定にenvセクションを追加します:
1 | { |
192.168.1.100をロボットの実際IPアドレスに置き換えてください。指定しない場合、サーバーはデフォルトIP 192.168.1.100を使用します。
次のステップ:
- 設定ファイルを保存
- MCPクライアントを再起動
- Universal Robot MCPサーバーがツールとして利用可能になります
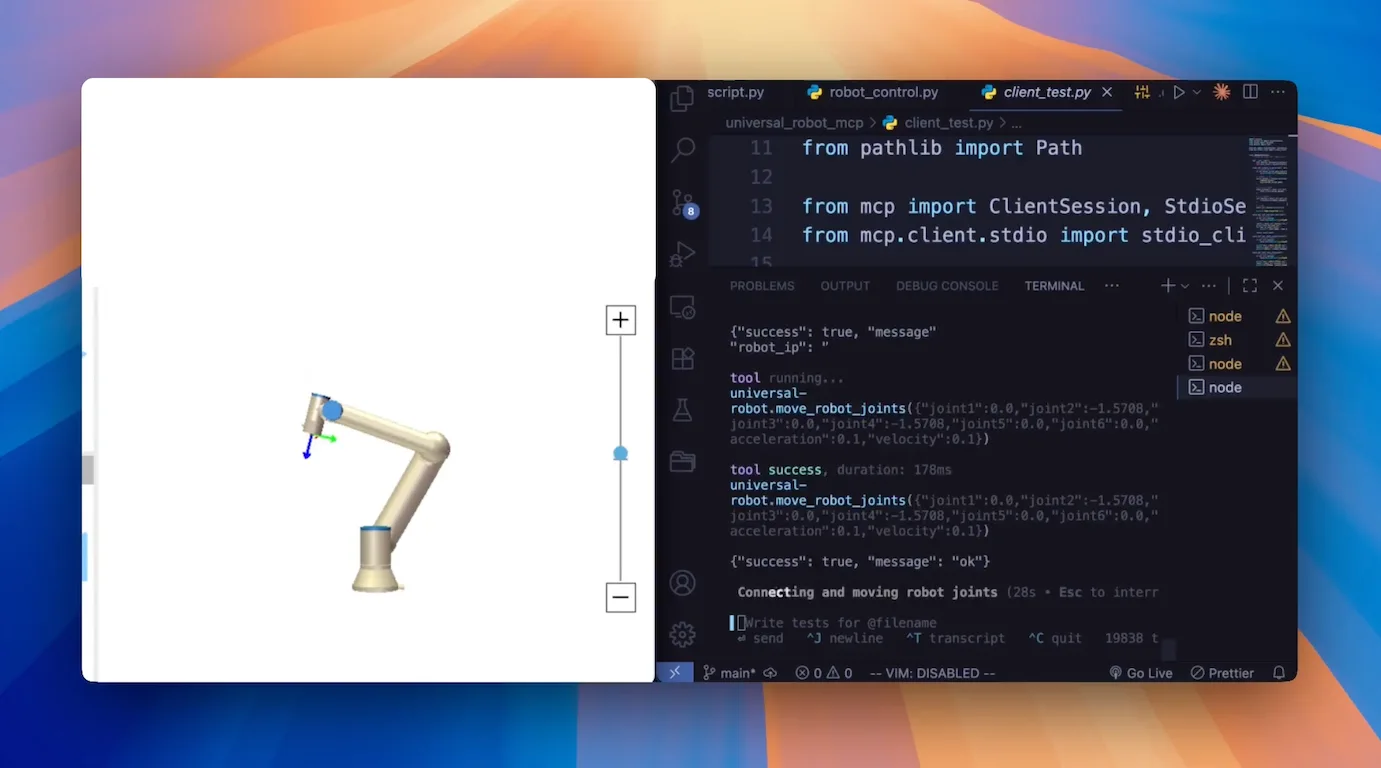
ステップ4: 基本的な使用方法
設定が完了すると、自然言語コマンドでUniversal Robotの制御を開始できます:
ロボットへの接続:
1 | "IPアドレス192.168.1.100のロボットに接続して" |
基本コマンド:
1 | "ロボットの現在の状態は?" |
異なるシステムへの接続:
- 実機ロボット: ロボットの実際IPアドレスを使用
- URSimシミュレータ:
127.0.0.1またはlocalhostを使用 - Polyscope: インストール > 一般でロボットのIPを確認
例:
1 | あなた: "Universal Robotに接続して" |
他のMCPサーバーとの連携:
Universal Robot MCPサーバーは、同じクライアント内で他のMCPサーバーと並行して使用できます。例えば、ファイルシステムツール、ウェブスクレイパー、データベースコネクタと組み合わせて強力なオートメーションワークフローを作成できます:
1 | "カメラMCPサーバーで写真を撮ってから、ロボットを動かして部品を検査して" |
まとめ
AIアシスタントを通じてURロボットを制御するためのUniversal Robot MCPサーバーのセットアップと使用方法を習得しました。この統合により、安全基準と精度を維持しながら、産業用ロボットの自然言語制御が可能になります。
主要な利点:
- AIアシスタントを通じた自然言語ロボット制御
- 異なる開発環境でのマルチクライアントサポート
- 産業用アプリケーションのための組み込み安全機能
- 他のMCPサーバーとのシームレスな統合
次のステップ:
- 会話型AIを通じた高度なロボットプログラミングの探索
- 追加MCPサーバーを通じた視覚システムやセンサーとの組み合わせ
- 自然言語コマンドを使用したカスタムオートメーションワークフローの開発
リソース:
- Universal Robot MCP GitHubリポジトリ
- Universal Robot MCP PyPIパッケージ
- Model Context Protocolドキュメント
- Python URXライブラリ
- 記事バナー
Universal Robot MCPサーバーは、複雑な産業オートメーションがシンプルな会話でアクセス可能になる、人間とロボットのインタラクションの未来を表しています。今日からURロボットで実験を始め、AI主導のオートメーションの新しい可能性を発見してください。